This project presents another way in creating
animation of object transformation. The provided technique transforms
polygon-based three-dimensional objects instead of the conventional two-dimensional
image. This project presents one of the possible techniques used
in transforming polyhedral 3D objects. This technique utilizes topological
and geometric information obtained from the original 3D models in establishing
intermediate object’s vertices, edges, and faces. This three-dimensional
shape transformation technique is useful in producing the more complex
type of special effect animations than the one obtained from two-dimensional
morphing algorithm. They could be used in virtual reality application
such as 3D-computer games and entertainment world.
Furthermore, this project explores a few variations
in obtaining different morphing scheme such as objects' center selection
and non-linear non-symmetric polygon interpolation. All results can
be found later in this paper and in application section.
Keywords : Computer Animation, Polyhedral
Object Model Construction, OpenGL Computer-Aided Geometric Design, Shape
Topological Transformation and Interpolation.

 |
 |
 |
 |
|
|
|
|
|
| Convex Hull Object : Every interior points see
every point on its surface.
|
Star Shape Object: There is at least one interior point that sees every point on its surface. | Non Star-shaped object: There is no interior point that can see every point on its surface. | Object with hole is considered a non-start shaped object since such a point is not exist. |

|

|
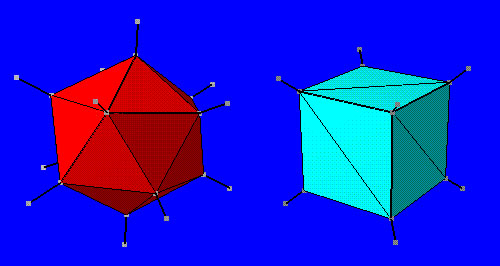
Throughout the paper, the original polyhedral
model will be referred as M1 and M2. V1 and V2 are the list of vertexes
in the corresponding models M1 and M2. E1, E2, F1, and F2 are the
list of edges and faces in the corresponding models. The algorithm
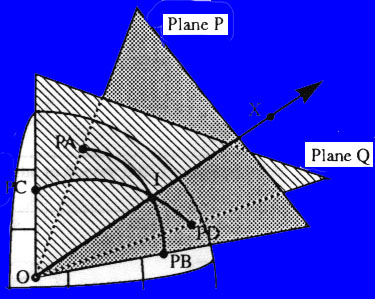
works by projecting each model on the surface of a unit sphere. The
projected model of M1 on the unit sphere is called PM1, and the projected
model of M2 is called PM2. The projection algorithm is very simple. It
can be done by constructing a ray from the center point, the point that
is used as the center of the transformation, to each vertex. This center
point must be an interior point that sees all the other point on the object’s
surface in that case the transformation object is not a convex hull object.
The vertex is moved in either positive or negative direction along this
ray until the unit distance from the center point is obtained. Please noted
that after all the vertex are moved to a unit
distance away from the center point, object’s
edge remain connecting the same two vertexes. However, it new projected
edges are no longer a straight line but an arc connecting the same two
adjusted vertexes that lies along the sphere surface. Figure 5
below shows an example of how topological elements, including vertexes,
edges, and faces, of a star-shaped polyhedral three-dimensional object
is projected on the surface of the unit sphere.
After the projection, both PM1 and PM2 have sphere
geometry with a different set of faces that form a complete cover of the
unit sphere surface. Then each face on either one of the projected
models, PM1 and PM2, is clipped and pasted on the other model forming a
common topology. The sphere is chosen as the common projection geometry
because of its ease to implement; however, other types of geometry can
be also used. For example, two-dimensional flat plane can also be
used for model’s topological elements to be projected on. This paper
discusses only the projecting on unit sphere technique.
|
Read in the Topology and Geometry of Each Model For Each Egde of Each Model
For Each Projection Edge (Arc) of Model 1
If Arcs Intersect
Adjust Edge Topology
|