Project 1: Feature Detection and Matching
Chau Nguyen (CMN68)
1. Feature Detection
Harris corner detection method is used to identified the gray scale image's points of interest in ComputeHarrisValues. First, the image is filtered by convolving it with a 7x7 Gaussian Kernel to eliminate noises. Then the image derivative in x and y direction is computed by convolving the filtered image with the derivative kernels. Finally compute the Harris matrix H for every pixel, and find the interest point c(H) by dividing the determinant of H by trace of H. Since c(H) is an extremely small number, we multiply c(H) by 100 and set the new value to be the harris value of that pixel. This makes the harris.tga picture more visible and also easier to choose the threshold that is used to compute the local maxima.
The next step is to choose the local maxima by choosing appropriate value for threshold in computeLocalMaxima. Every pixel in the image has a value c computed in ComputeHarrisValues, I choose c to be the local maxima of 5x5 neighborhood. The pixel that has local maxima c greater than the threshold is chosen to be the point of interest. Since Harris corner detection method is invariant to intensity scale but not invariant to intensity shift, the threshold value need to be shift by the same amount that the intensity is shifted. So I find the minimum value among all local maxima and set threshold to be the sum of 0.003 and the minimum value, expecting that if the intensity is shifted, this minimum value is also shifted by approximate the same amount.
The last step is to compute the eigenvector of the largest eigenvalue of the matrix H computed for every pixel. The canonical orientation of the feature is the direction of this eigenvector. Because the image itself already blurred by Gaussian filter, there is no much different between obtaining the feature orientation from eigenvector or from the feature gradient.
2. Feature Description
Three types of feature descriptors completed are: computeSimpleDescriptors, computeMOPSDescriptors, and computeCustomDescriptors.
The computeSimpleDescriptors function simply just takes the 5x5 window centered at the feature location and adds this window to feature data. This is a simplest feature descriptor, it is not invariant to any of the properties. It is expected that this feature descriptor does not perfom well.
The computeMOPSDescriptors is a simplified version of MOPS descriptor. It begins by smoothing the gray scale image with a Gaussian kernel. For each feature, it obtaines 40x40 window centered at the feature location and the direction of feature canonical orientation, then it convolves the window with a Gaussian filter and down-sample to 8x8 window size, and finally adds the 8x8 window to feature data. In order for MOPS to work well and robust, it has to be implemented in multi-scale. However, we do not implement multi-scale here, so MOPS either misses a lot of true postive features or matches almost all true postive features.
The
The harris images obtained from the test set graf and yosemite:
 |
 |
 |
 |
| Original graf 1 image | graf 1 harris image | Original graf 2 image | graf 2 harris image |
 |
 |
 |
 |
| Original yosemite 1 image | yosemite 1 harris image | Original yosemite 2 image | yosemite 2 harris image |
3. Feature Matching
The only feature matching needs to be implemented is
4. Extra Credit
Inspired by the power of ratio test, I implemented
 |
 |
| graf SIFT feature matching | yosemite SIFT feature matching |
5. Performance report
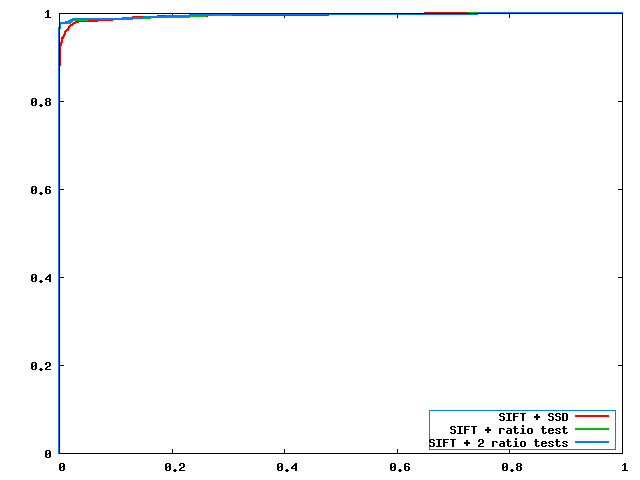
It is obvious that SIFT perfoms better than all 3 descriptors. There are some significant different between ssd distance and ratio test where the ratio test performs much better. MOPS either has very little (close to 0) true positive rate) or very high positive rates this is again is the problem of not doing multi-scaling. Non-scaling MOPS probably requires larger threshold to match features correctly. In addition, MOPS probably needs Non-maximal adaptive suppression method to eliminate the features that very similar to their neighbors.
 |
 |
| graf ROC curves | yosemite ROC curves |
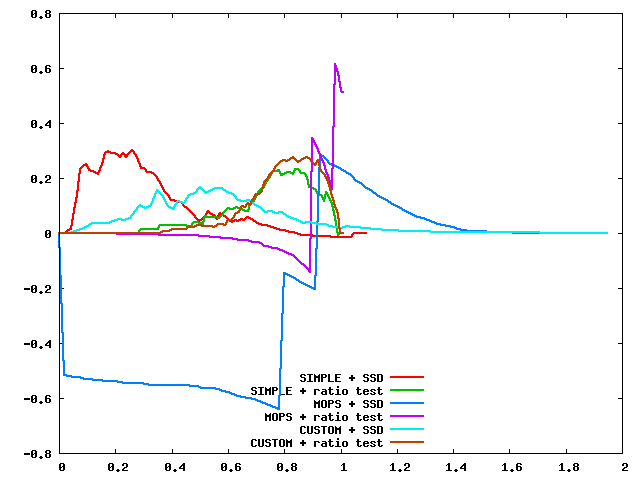
Here are the threshold curves of the descriptors and matching types.
 |
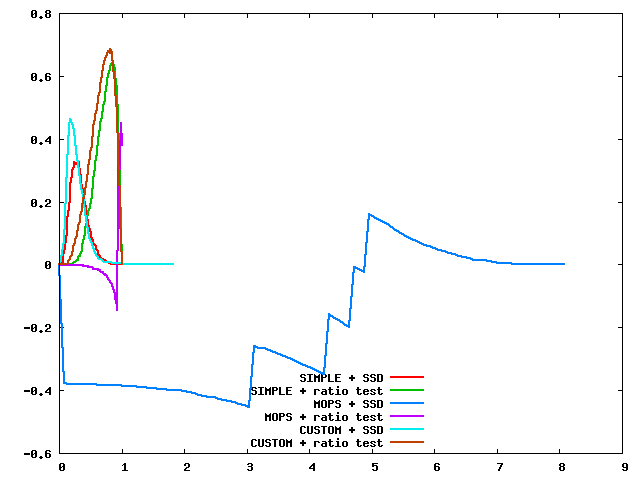 |
| graf threshold curves | yosemite threshold curves |
In general, performance of MOPS descriptor on the benchmark test sets is not as good as it supposed to be due to the lack of scaling. Custom descriptor - steerable descriptor performs better in most the cases. The different between ssd and ratio test is very significant which implies that there are many ambiguous matches in the data set and the ratio test helps clear this out. We can't really see the significant difference between ratio test and the 2 ratio tests (extra credit) probably due to the problem of the descriptors themselves cannot capture the invariance of features in images as good as SIFT.
| bikes data set | Simple descriptor | MOPS descriptor | Custom descriptor |
| ssd match features | 0.350847 | 0.237046 | 0.385985 |
| ratio match features | 0.510522 | 0.252641 | 0.562909 |
| 2 ratio match features | 0.506897 | 0.251912 | 0.559808 |
| graf data set | Simple descriptor | MOPS descriptor | Custom descriptor |
| ssd match features | 0.63027 | 0.403567 | 0.49836 |
| ratio match features | 0.507244 | 0.332007 | 0.527187 |
| 2 ratio match features | 0.510464 | 0.368479 | 0.527619 |
| leuven data set | Simple descriptor | MOPS descriptor | Custom descriptor |
| ssd match features | 0.090903 | 0.085702 | 0.110292 |
| ratio match features | 0.507252 | 0.235719 | 0.482009 |
| 2 ratio match features | 0.497275 | 0.231686 | 0.477939 |
| wall data set | Simple descriptor | MOPS descriptor | Custom descriptor |
| ssd match features | 0.157162 | 0.165642 | 0.252964 |
| ratio match features | 0.536996 | 0.201587 | 0.52251 |
| 2 ratio match features | 0.535597 | 0.215594 | 0.523139 |
6. Some other testing images
 |
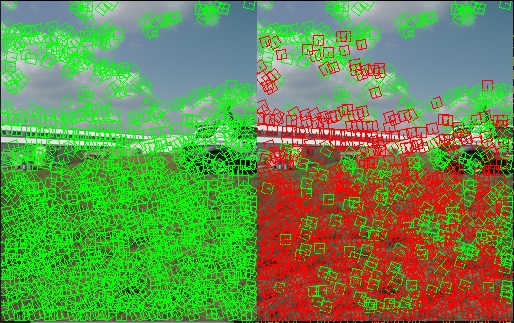 |
 |
| Original Image | Matching with ifself under MOP descriptor | Matching with ifself under custom (steerable filter) descriptor |
 |
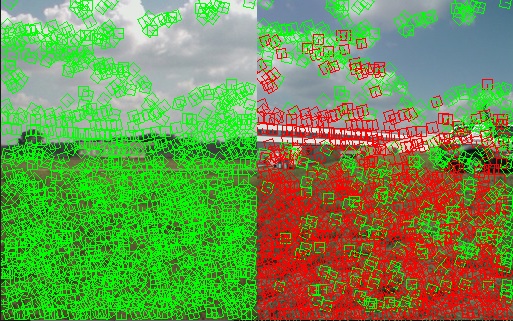 |
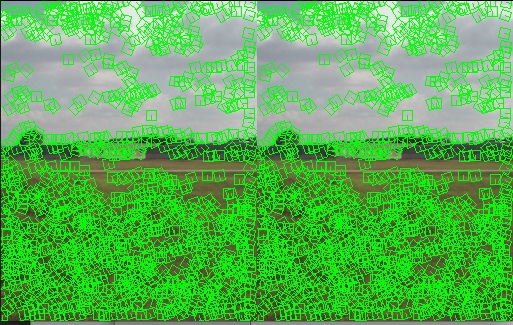 |
| Original Image | Matching with ifself under MOP descriptor | Matching with ifself under custom (steerable filter) descriptor |