Computer Vision project 1
Featuring Detecting and Matching
Changhung Lai, cl822
Customer
Descriptor Design
The descriptor is composed by a 5 by 5 window with the pixel intensity and gradient. Idea is to implement a more accurate descriptor than simple descriptor but not as complicate as MOPS descriptor. A window simply record the pixel value is a good descriptor to shift feature. Besides, the gradient gives us some information on how the image pixel intensity changes on average. By the experiments result i have, this descriptor actually works better than simple descriptor but worst then MOPS of most of the time.
Experiments Result
Comparison
|
|
Simple + SSD |
Simple + ratio |
MOPS + SSD |
MOPS + Ratio |
Custom + SSD |
Custom + Ratio |
|
graf |
.449 |
.530 |
.394 |
.464 |
.442 |
.534 |
|
Leuven |
.096 |
.538 |
.112 |
.467 |
.076 |
.512 |
|
bikes |
.317 |
.499 |
.432 |
.534 |
.331 |
.513 |
|
wall |
.212 |
.532 |
.389 |
.499 |
.289 |
.563 |
Harris Image

AUC plot
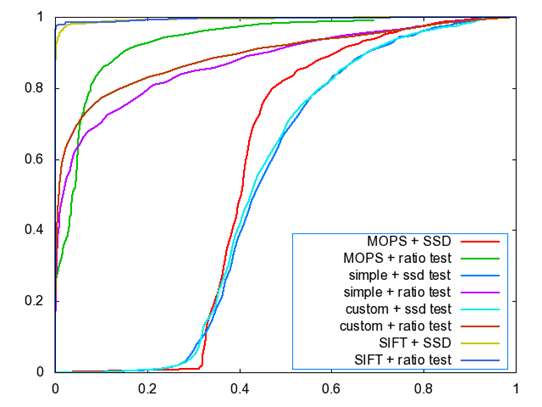
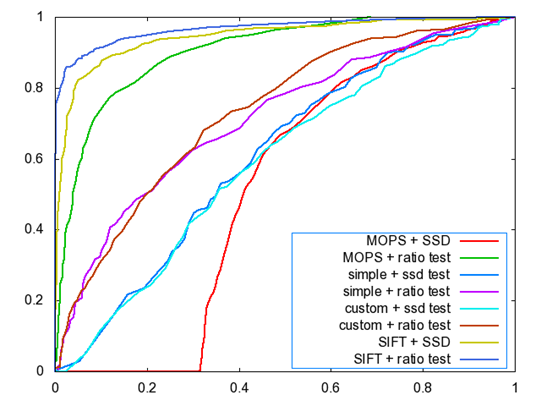
(Yosemeti) (graf)
Strength &
Weaknesses
Our descriptor is variant to rotation, scale and illumination. Besides, it use three times of memory than simple descriptor. The strength is that it is a simple and straight forward descriptor but works better than simple descriptor.
Some Extra Test
We will test on an image with shift feature
Original
image


Harris
Image

