Project 1: CS 6670 Computer Vision
My Feature Detector
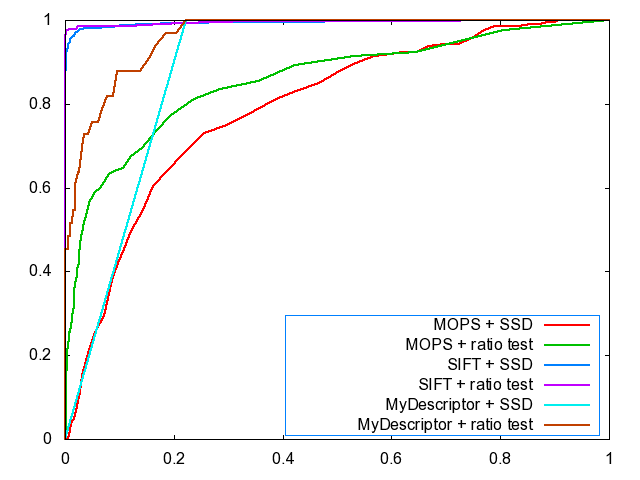
My descriptor uses a combination of the MOPS with colored pixels. I seperated the image into the three channels (RGB) and took a 41x41 orientated window and convovled this window with a gaussian mask. I then subsample twice, each time performing convolution with the gaussian kernel to obtain three 10x10 images. I then added the strongest intensity of the three colors into the feature descriptor. My assumption is that color and the intensity of the colors is one parameter that can help improve the feature matching.Below are the ROC and AUC values calculated for the Yosemite.jpg
| Descriptor | MatchType | AUC Score |
| MOPs | SSD | 0.600410 |
| MOPs | Ratio | 0.778537 |
| My Descriptor | SSD | 0.889078 |
| My Descriptor | Ratio | 0.962335 |

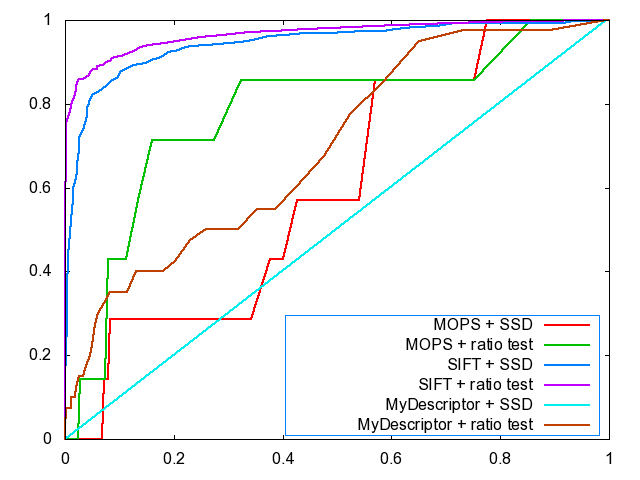
| Descriptor | MatchType | AUC Score |
| MOPs | SSD | 0.790171 |
| MOPs | Ratio | 0.856265 |
| My Descriptor | SSD | 0.502470 |
| My Descriptor | Ratio | 0.695195 |


The average AUC for the my detector is around 0.762332 where as the average AUC for the simple detector is around 0.683283.
My descriptor seems to do better when the features are not all of the same color palette. My descriptor tends to be more conservative and makes less incorrect matches than the other descriptor, but it is still not as good as SHIFT.
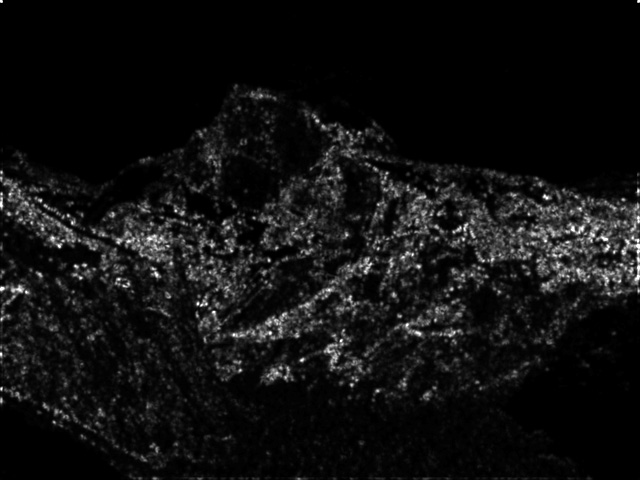
Here are some other images that I tested out for the project using my descriptor.
