Project 3: Panoramas
Panorama using spherical warp and translations:
Low res photo:

{kind=link}
Our own attempt at a panorama:

Our own attempt at a panorama- with SIFT!:

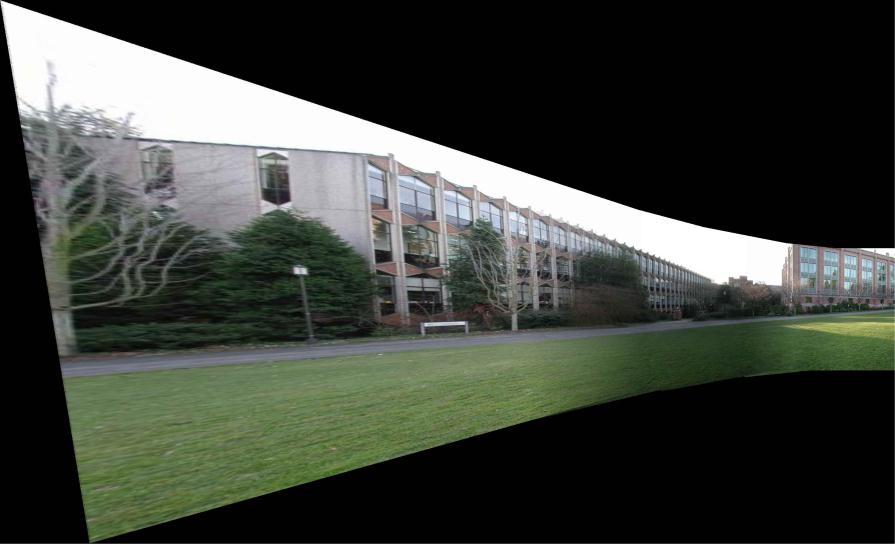
Panorama using homographies on unwarped images:

What can go wrong when using homographies on unwarped images:
What worked and what didn’t:
When we first started writing ComputeHomography, we attempted to choose the minimum nonzero eigenvalue to determine the row of V to use for our homography, but it turned out that this was not what we wanted.
If we actually have an eigenvalue of zero, this is much
better than a nonzero eigenvalue because it means we managed to fit the points
exactly. It was also unnecessarily computationally intensive since the Eigen
library
already provided the columns in sorted order.