Design decisions
We decided to ignore all features whose descriptor window would go out of bounds. Since the pictures will be relatively large as compared with the windows, we will still have many features. This makes determining the descriptors easier and more robust. When calculating the harris values, we used the boarder values (clamping) for values out of the pictures. We choose this becuase having 0 might produce extraneous edges.
Performance
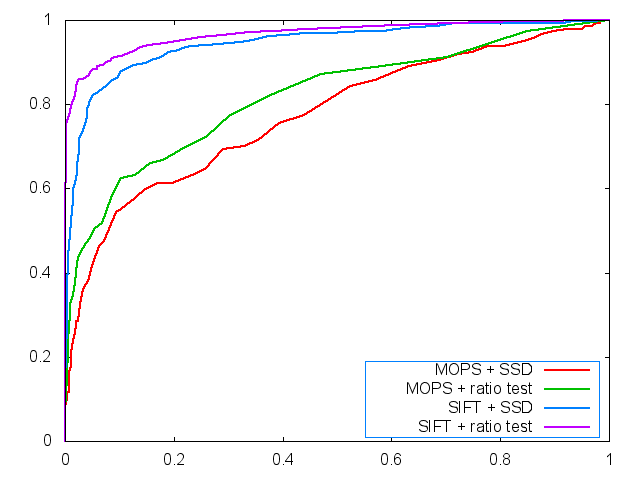
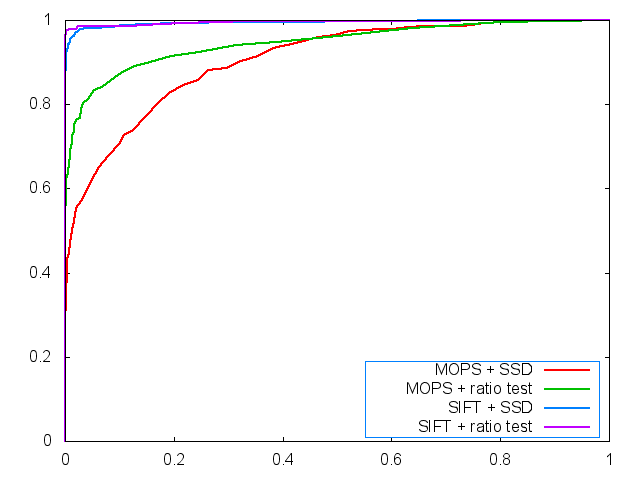
ROC
Curves for
Graffiti:
AUC for comparison
between 1 and 2:
Simple:
0.774559
Ratio: 0.818082
AUC for comparison
between 1 and 4:
Simple:
0.691226
Ratio: 0.739354
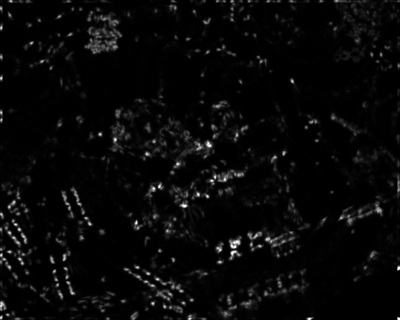
Harris
operator for img1.ppm:
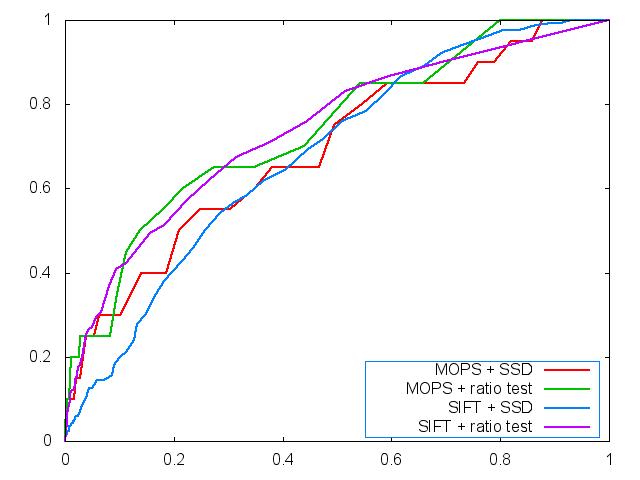
Yosemite:
AUC for comparison
between 1 and 2:
Simple:
0.905444
Ratio: 0.945654
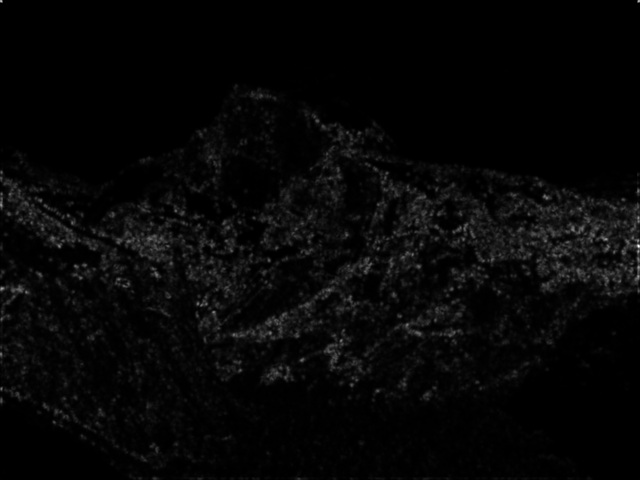
Harris
image for Yosemite:
Average AUC
Leuven:
Simple:
SSD: 0.287985
Ratio: 0.605873
MOPS:
SSD: 0.6863996
Ratio: 0.870592
Bikes:
Simple:
SSD: 0.170991
Ratio: 0.509464
MOPS:
SSD: 0.657506
Ratio: 0.816662
Wall:
Simple:
SSD: 0.316945
Ratio: 0.650645
MOPS:
SSD: 0.692474
Ratio: 0.816313
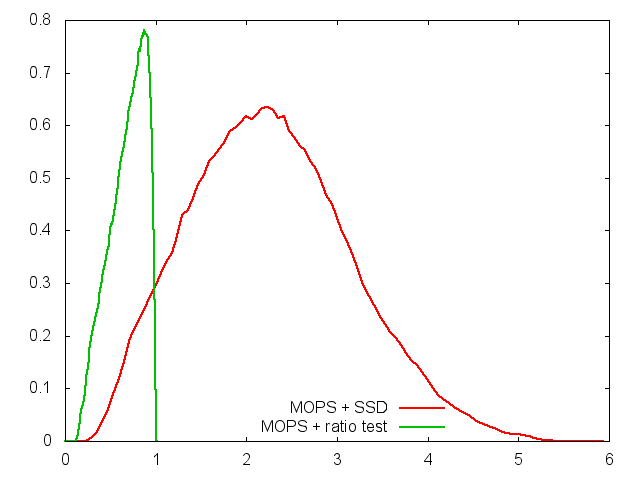
Strengths/Weaknesses
MOPS seems
invariant to translation, intensity changes, rotations, and limited amount of
affine changes as shown below. However, it did badly with large perspective
changes such as those in graffiti.
Our own pictures!
A
Ferris wheel!


The harris matrix:

And
the comparison:
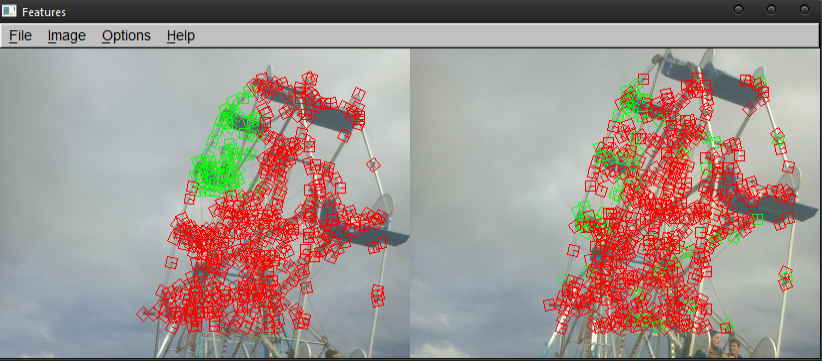
The
MOPS descriptor worked reasonably well on this image, but it’s invariance
to rotation resulted in a lot of false matches with the various metal tubes
forming the Ferris Wheel’s structure. The
uniform grey background also made finding matches harder, though the threshold
on local max did prevent the clouds from being marked as features outright.