CS4670 Project 2
William Schurman - wts34
Bryan Cuccioli - blc72
Design Choices
We compute the gradients for the Harris matrix by e.g. subtracting the pixel to the left for the x gradient and the pixel above for the y gradient. While not the most sophisticated method, we noticed little to no disadvantage as opposed to using e.g. Sobel operators. We compute the feature orientation as the angle of the dominant eigenvector, which computationally seems the easiest way to compute this.
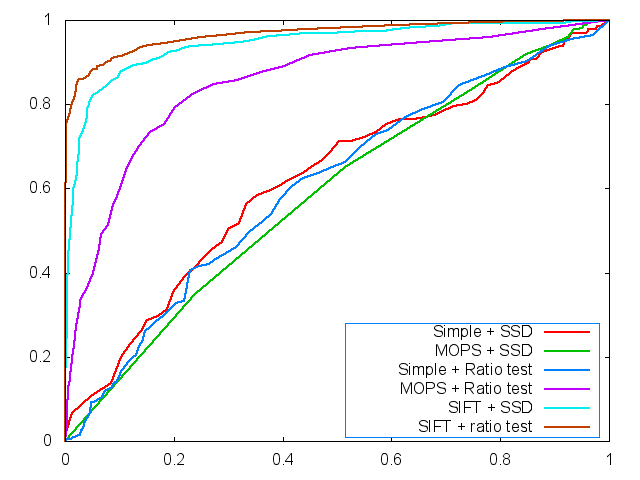
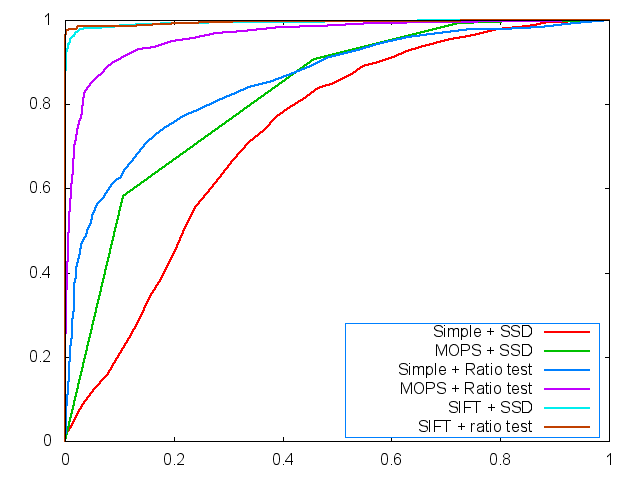
| Roc Curves | Harris operator image | |
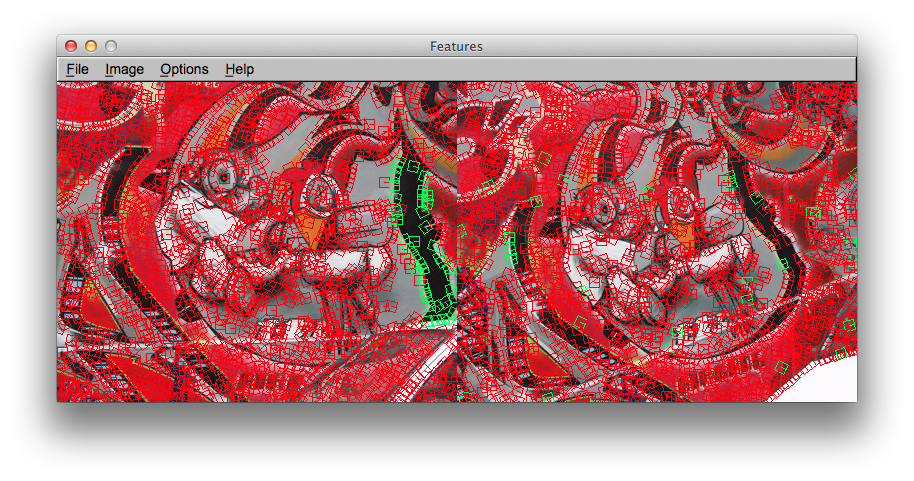
Grafitti image |
|

|
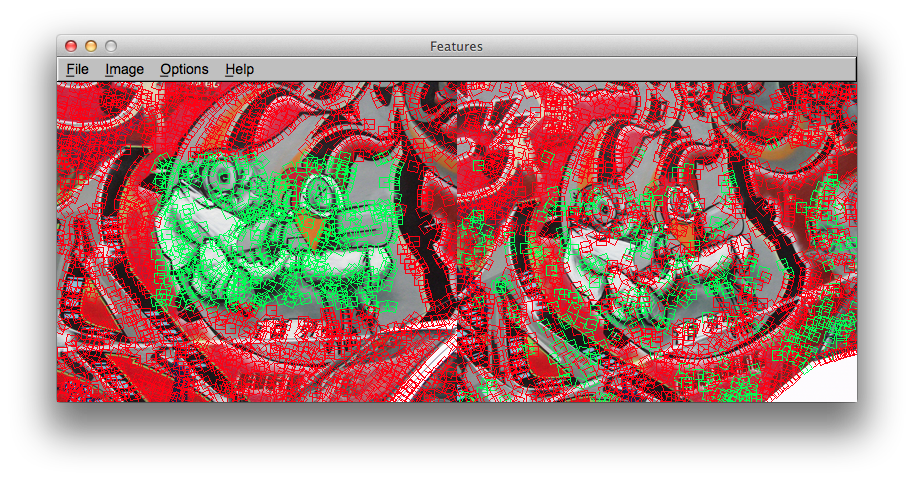
Yosemite image |
|
|
Average AUCs
| Simple Descriptor + SSD | Simple Descriptor + Ratio | MOPS Descriptor + SSD | MOPS Descriptor + Ratio | |
| leuven | 0.093 | 0.537 | 0.519 | 0.661 |
| bikes | 0.274 | 0.454 | 0.535 | 0.571 |
| wall | 0.216 | 0.544 | 0.526 | 0.624 |
| graf | error: couldn't load image 3 | error: couldn't load image 3 | error: couldn't load image 3 | error: couldn't load image 3 |
Strengths & Weaknesses
Strengths:
===================
o Finds features well - doesn't highlight too much or too little
o Uses efficient methods of computation
Weaknesses:
===================
o Gradient calculation is a little simplified
o Threshold is not terribly appropriate for all images
Images